Note
Go to the end to download the full example code.
Explaining a Vision Transformer¶
This example shows how to explain an image classification by a Vision
Transformer (ViT) using shapiq. The image is divided into patches
and each patch becomes a player in a cooperative game. Shapley values
then quantify how much each patch contributes to the predicted class.
We use the ImageClassifierLocalXAI game
from the shapiq_games package, which wraps a pretrained ViT model and
handles patch masking internally.
from __future__ import annotations
import os
# Prevent OpenMP/MKL thread conflicts with PyTorch backend
os.environ.setdefault("OMP_NUM_THREADS", "1")
os.environ.setdefault("MKL_NUM_THREADS", "1")
import tempfile
from pathlib import Path
import numpy as np
from PIL import Image
import shapiq
from shapiq_games.benchmark import ImageClassifierLocalXAI
Set Up the Image Game¶
We use a ViT model with a 3x3 grid (9 patches). Each patch is a player in the cooperative game. The game value for a coalition is the model’s predicted probability for the top class when only those patches are visible.
We create a synthetic image here for portability. In practice you would pass the path to a real photograph.
rng = np.random.default_rng(42)
image = Image.fromarray(rng.integers(0, 255, (384, 384, 3), dtype=np.uint8))
image_path = str(Path(tempfile.gettempdir()) / "shapiq_vit_example.png")
image.save(image_path)
game = ImageClassifierLocalXAI(
model_name="vit_9_patches",
x_explain_path=image_path,
normalize=True,
)
print(f"Number of patches (players): {game.n_players}")
print(f"Grand coalition value: {game.grand_coalition_value:.3f}")
Loading weights: 0%| | 0/200 [00:00<?, ?it/s]
Loading weights: 100%|██████████| 200/200 [00:00<00:00, 5528.64it/s]
Number of patches (players): 9
Grand coalition value: 0.037
Compute Shapley Values¶
With 9 patches we use KernelSHAP with a small budget.
approx = shapiq.KernelSHAP(n=game.n_players, random_state=42)
sv = approx.approximate(budget=50, game=game)
print(sv)
InteractionValues(
index=SV, max_order=1, min_order=0, estimated=True, estimation_budget=50,
n_players=9, baseline_value=0.0,
Top 10 interactions:
(2,): 0.011702344163690898
(8,): 0.008703230833669941
(6,): 0.006998279437172741
(3,): 0.004834377887004544
(4,): 0.004243883506523786
(5,): 0.002051319919835929
(0,): 0.0012419913442013296
(1,): 0.0005732134812191114
(): 0.0
(7,): -0.0034371312721862353
)
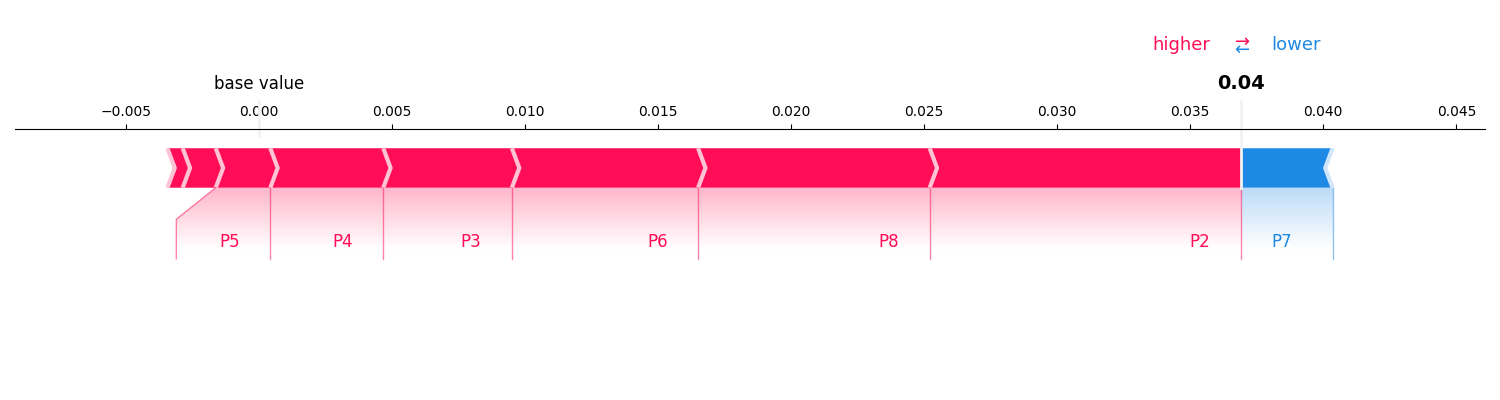
Visualize Patch Importance¶
A force plot shows how each patch pushes the prediction away from the baseline (all patches masked).
patch_names = [f"Patch {i}" for i in range(game.n_players)]
sv.plot_force(feature_names=patch_names)
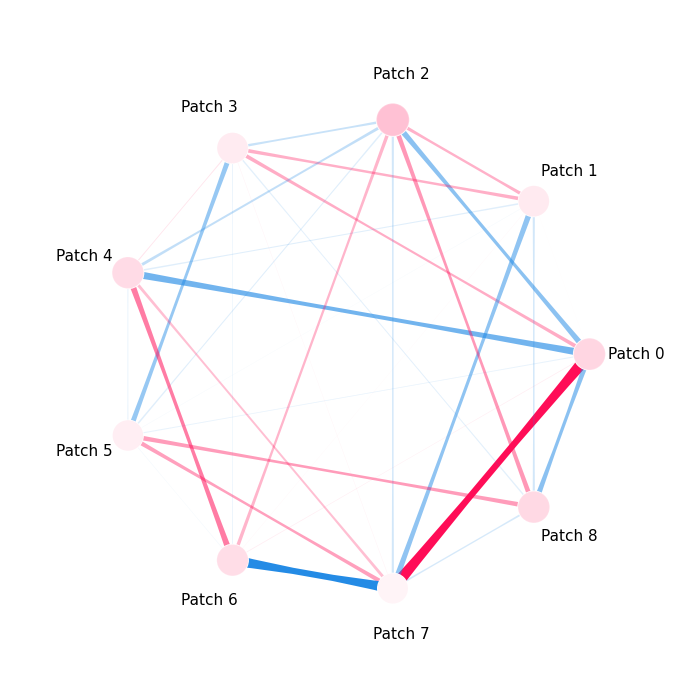
Second-Order Interactions¶
We can also compute pairwise interactions to see which patches interact with each other.
approx_k_sii = shapiq.KernelSHAPIQ(n=game.n_players, index="k-SII", max_order=2, random_state=42)
sii = approx_k_sii.approximate(budget=50, game=game)
sii.plot_network(feature_names=patch_names)
References¶
Total running time of the script: (0 minutes 36.176 seconds)